信息摘要:
机器人视觉领域是最早开始研究有纹理的物体的,如饮料瓶、零食盒等表面带有丰富纹理的都属于这一类。
机器人视觉领域是最早开始研究有纹理的物体的,如饮料瓶、零食盒等表面带有丰富纹理的都属于这一类。
当然,这些物体也还是可以用类似边缘提取+模板匹配的方法。但是,实际上下料机器人操作过程中,环境会更加复杂:光照条件不确定(光照)、物体距离相机距离不确定(尺度)、相机看物体的角度不确定(旋转、仿射)、甚至是被其他物体遮挡(遮挡)。
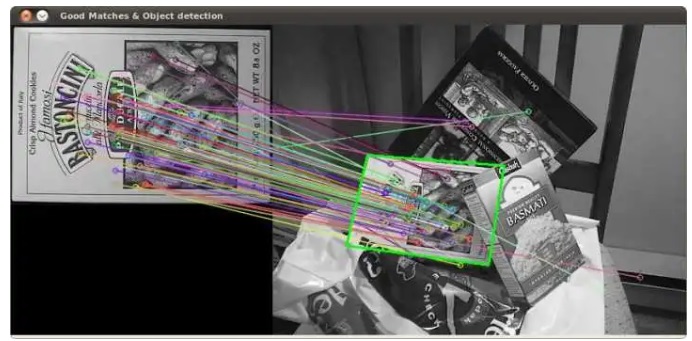
Lowe提出了一个叫做SIFT(Scale-invariantfeaturetransform)的超强局部特征点:
Lowe,DavidG."Distinctiveimagefeaturesfromscale-invariantkeypoints."Internationaljournalofcomputervision60.2(2004):91-110.
具体原理可以看上面这篇被引用4万+的论文或各种博客,简单地说,这个方法提取的特征点只跟物体表面的某部分纹理有关,与光照变化、尺度变化、仿射变换、整个物体无关。
因此,利用SIFT特征点,可以直接在相机图像中寻找到与数据库中相同的特征点,这样,就可以确定相机中的物体是什么东西(物体识别)。
对于不会变形的物体,特征点在物体坐标系下的位置是固定的。所以,我们在获取若干点对之后,就可以直接求解出相机中物体与数据库中物体之间的单应性矩阵。
如果我们用深度相机(如Kinect)或者双目视觉方法,确定出每个特征点的3D位置。那么,直接求解这个PnP问题,就可以计算出物体在当前相机坐标系下的位姿。
当然,实际操作过程中还是有很多细节工作才可以让它真正可用的,如:先利用点云分割和欧氏距离去除背景的影响、选用特征比较稳定的物体(有时候SIFT也会变化)、利用贝叶斯方法加速匹配等。
而且,除了SIFT之外,后来又出了一大堆类似的特征点,如SURF、ORB等。