信息摘要:
由于我们所有物体识别都只是计算物体在相机坐标系下的位姿,但是,上下料机器人操作物体需要知道物体在上下料机器人坐标系下的位姿。所以,我们先需要对相机的位姿进行标定。
由于我们所有物体识别都只是计算物体在相机坐标系下的位姿,但是,上下料机器人操作物体需要知道物体在上下料机器人坐标系下的位姿。所以,我们先需要对相机的位姿进行标定。
内参标定就不说了,可参照各种标定工具箱;
外参标定的话,根据相机安装位置,有两种方式:
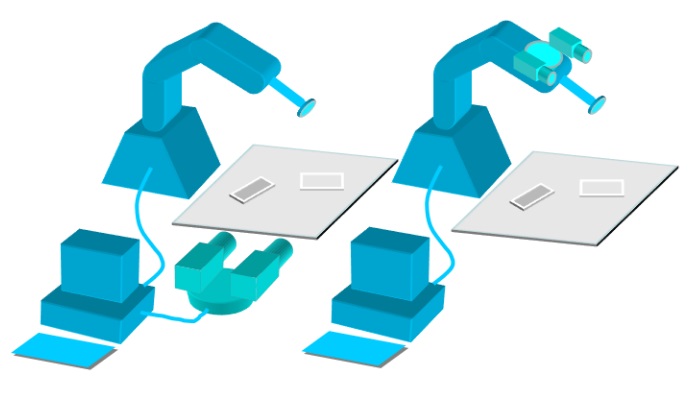
Eye to Hand:相机与上下料机器人极坐标系固连,不随上下料机器人运动而运动
Eye in Hand:相机固连在上下料机器人上,随机器人运动而运动
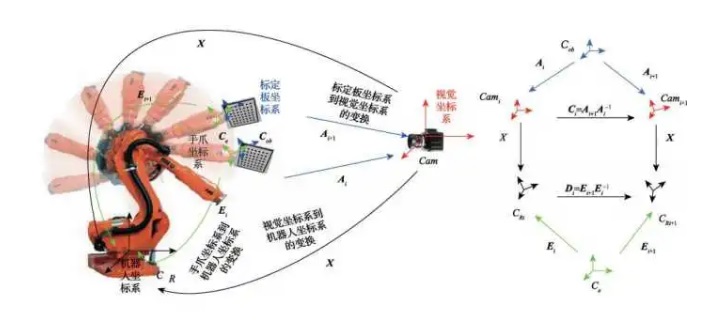
两种方式的求解思路都类似,首先是眼在手外(Eye to Hand)
只需在上下料机器人末端固定一个棋盘格,在相机视野内运动几个姿态。由于相机可以计算出棋盘格相对于相机坐标系的位姿A_i 、机器人运动学正解可以计算出上下料机器人底座到末端抓手之间的位姿变化E_i 、而末端爪手与棋盘格的位姿相对固定不变。
这样,就可以得到一个坐标系环 CX=XD
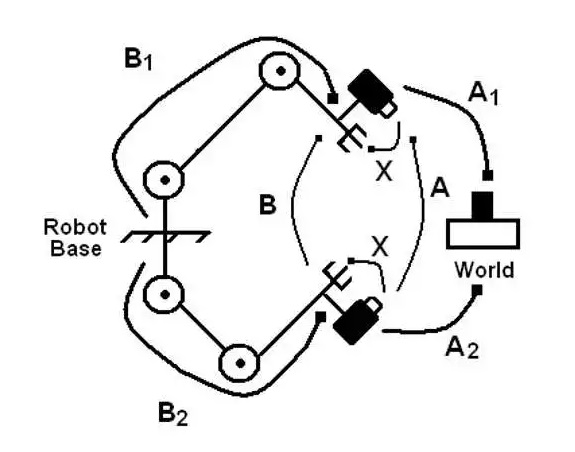
这种结构的求解有很多方法,这边给出一个参考文献:
Shiu, Yiu Cheung, and Shaheen Ahmad. "Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX= XB."ieee Transactions on Robotics and Automation 5.1 (1989): 16-29.
而对于眼在手上(Eye in Hand)的情况,也类似,在地上随便放一个棋盘格(与上下料机器人基座固连),然后让机械臂带着相机走几个位姿,然后也可以形成一个AX=XB 的坐标环。