接上文
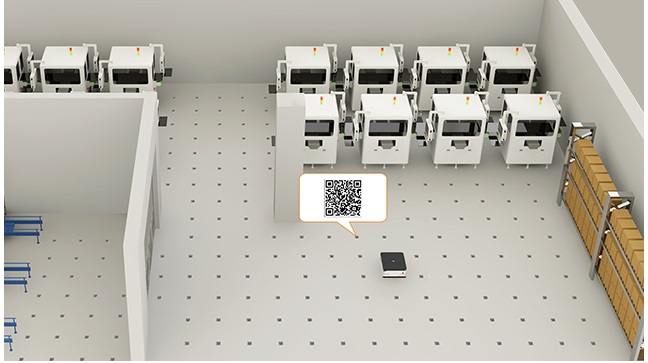
二维码导航
由二维码替代磁钉的导航方式,典型应用为亚马逊kiva机器人,实现了“货到人”的拣选模式。
优点为AGV运行准确,铺设成本低,路径调整较为方便;不足之处在于二维码容易污损,需定期维护;应用柔性低,无法适应人机共融环境;同时对作业环境(如无尘室)和地面平整度等客观条件有****要求。
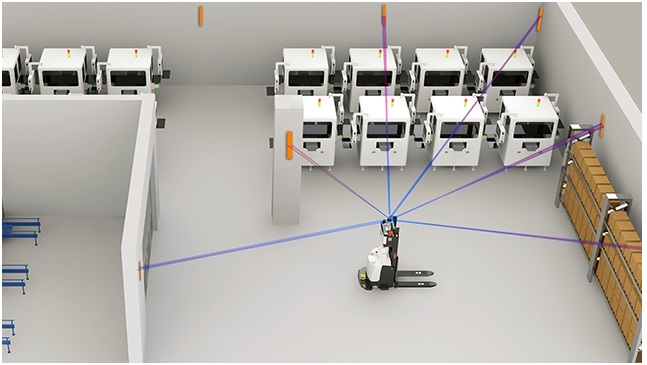
激光反射板导航
在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。
优点为地面无需施工,AGV行驶路线灵活。不足之处在于需要提前按照****要求铺设反射板,成本较高;适用于周边无遮挡的作业环境。
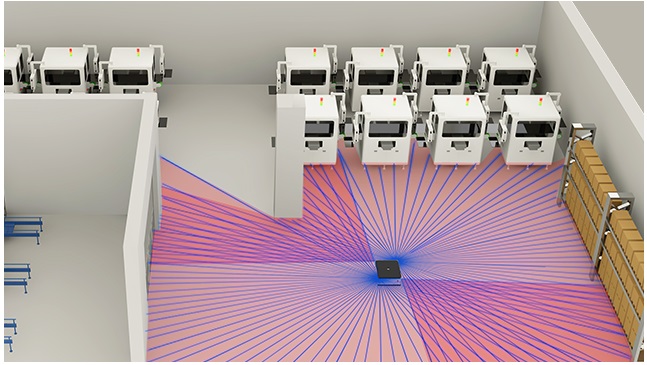
激光SLAM导航
无需二维码、反射板等辅助导航标志,而是通过工作场景的自然环境(比如柱子、墙面等)作为参照物,实现定位导航。
优点在于无需硬件施工,部署成本低;且能够实现灵活的停障避障和人机共融作业;AGV行驶路径灵活多变,并可通过软件进行动态编辑,满足柔性生产需要;但在应用中也存在一些弊端,比如在高动态或类似透明、镜面等环境中作业时,容易出现定位丢失的情况。
更多AGV相关内容:www.rayeeintel.com