信息摘要:
随着AGV智能物流机器人的应用越来越广泛,如何选择合适的AGV产品就成为了用户迫切需要了解的问题。其中,导航方式作为AGV的一项核心技术,更是受到了广泛关注。本文就对当下AGV应用的几种不同导航方式进行梳理,以期能够给大家提供帮助。
随着AGV智能物流机器人的应用越来越广泛,如何选择合适的AGV产品就成为了用户迫切需要了解的问题。其中,导航方式作为AGV的一项核心技术,更是受到了广泛关注。本文就对当下AGV应用的几种不同导航方式进行梳理,以期能够给大家提供帮助。
目前,常见的AGV导航方式主要有以下几种,分别有着不同的适用场景和特点:
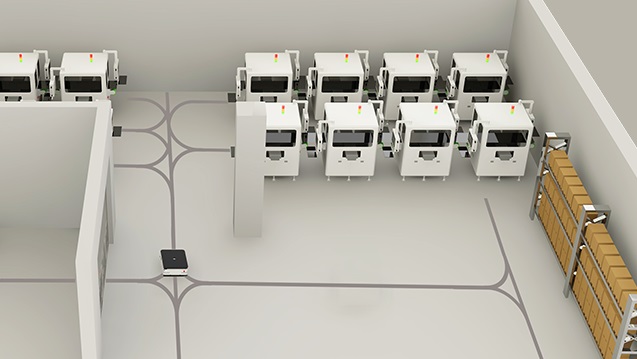
磁条导航
在路面上铺设磁条,通过磁导航传感器不间断感应磁信号来实现AGV的导航。
优点为技术成熟可靠,成本较低,铺设实施较为简单。缺点是要提前施工;磁条容易受损和污染,需定期维护;且AGV行驶路线无法便捷调整,灵活性差。
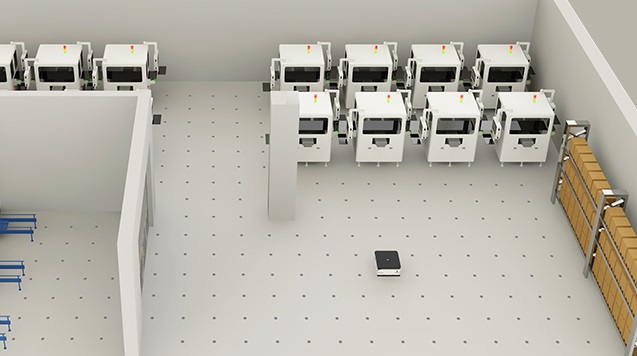
磁钉导航
同样是通过磁导航传感器感应磁信号来进行导航,不同的是将之前的磁条连续感应替代为磁钉间隔感应,AGV行进路径由磁钉连线确定。
优点为技术成熟可靠,成本较低;隐蔽性较好,不易被损坏。缺点是需提前开凿预埋,施工成本高;灵活性差,后期变更成本高;磁钉间隔区域存在不稳定性,不适应人机共融环境;且在重载场景下,磁钉容易被损坏,更换困难。
更多AGV相关内容:www.rayeeintel.com