信息摘要:
在上下料机器人的调试中,某些厂商提供的上下料机器人中有一些重要参数,关系到机器人本身的多重性能。包括负载数据、工件数据等。下面以ABB机器人为例,重点说一下工件数据。
在上下料机器人的调试中,某些厂商提供的上下料机器人中有一些重要参数,关系到机器人本身的多重性能。包括负载数据、工件数据等。下面以ABB机器人为例,重点说一下工件数据。
ABB机器人的工件数据(wobjdata)是由逻辑状态bool数据robhold和ufprog、字符串string数据ufmec、坐标系姿态pose数据uframe和oframe复合而成的。
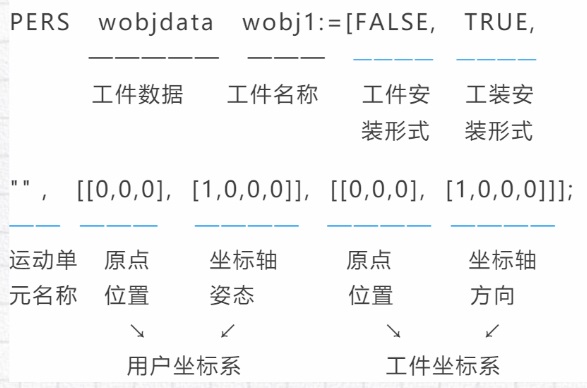
一般情况下,我们建立的工件数据的工件安装形式、工装安装形式、运动单元名称、工件坐标系与wobj0是一致的。所以,在我们建立工件数据时,只需要确定用户坐标系的原点位置和坐标轴方向即可。ABB机器人默认工件数据wobj0的定义如下所示:
PERS wobjdata wobj0 := [FALSE, TRUE, "", [[0, 0, 0],[1, 0, 0, 0]],[[0, 0, 0],[1, 0, 0, 0]]];
工件数据wobjdata
自定义工件数据的建立
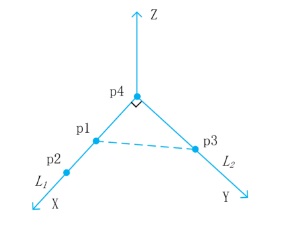
如下图所示,已知空间不在同一直线上的任意三点p1(x1,y1,z1)、p2 (x2,y2,z2)和p3(x3,y3,z3)的坐标。
从工件数据的定义可知,我们自定义的工件数据只需要确定两个方面的内容,分别是用户坐标系的原点位置和用户坐标系的坐标轴原点姿态(方向)。
(未完)