信息摘要:
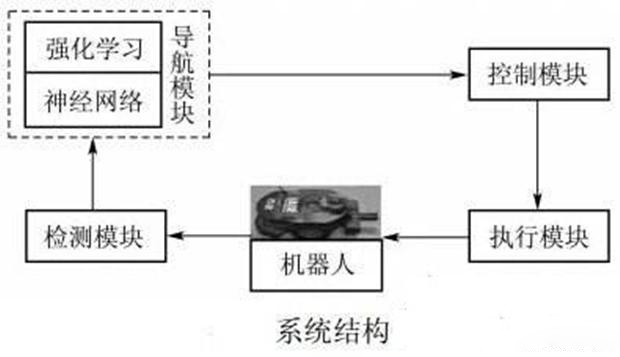
上下料机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项目的控制是上下料机器人控制系统的主要任务,其中有些项目的控制是非常复杂的。上下料机器人控制系统的主要功能包括以下两点:
上下料机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项目的控制是上下料机器人控制系统的主要任务,其中有些项目的控制是非常复杂的。上下料机器人控制系统的主要功能包括以下两点:
(1)示教再现功能。示教再现功能是指控制系统可以通过示教盒或手把手进行示教,将动作顺序、运动速度、位置等信息用****的方法预先教给工业机器人,由工业机器人的记忆装置将所教的操作过程自动地记录在存储器中,当需要再现操作时,重放存储器中存储的内容即可。如需更改操作内容时,只需重新示教一遍。
(2)运动控制功能。运动控制功能是指对上下料机器人末端操作器的位姿、速度、加速度等项目的控制。
以上概述的上下料机器人控制系统的主要功能,在其他类别工业机器人中一样适用。