信息摘要:
在臂展范围内,理论上机器人可以到达任意点,但事实上,由于多种原因,有些点位机器人无法到达,也有些点位,机器人在某种姿态下会发生报警,或根据算法,采用另一种姿态通过,这种点位,我们称为:奇异点。下面,就以发内科机器人为例,说一下上下料机器人的奇异点问题。
在臂展范围内,理论上机器人可以到达任意点,但事实上,由于多种原因,有些点位机器人无法到达,也有些点位,机器人在某种姿态下会发生报警,或根据算法,采用另一种姿态通过,这种点位,我们称为:奇异点。下面,就以发内科机器人为例,说一下上下料机器人的奇异点问题。
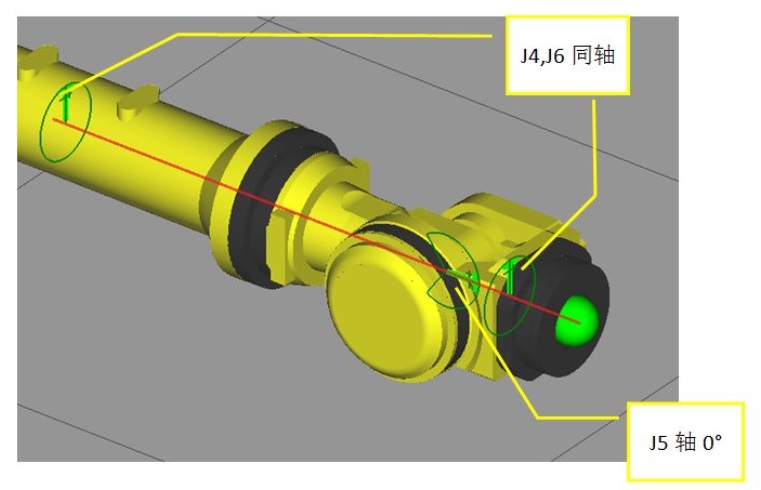
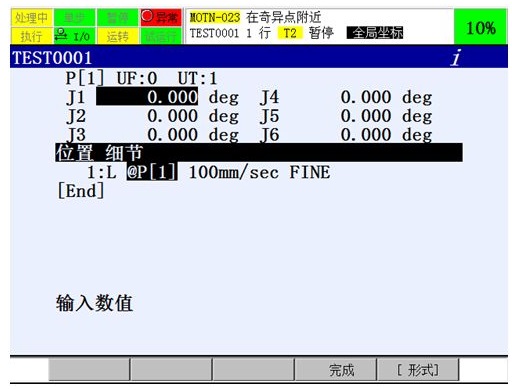
在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。
当机器人J5轴处于0°位置,机器人会出现MOTN-023报警:
当机器人在执行动作类型为L,C,A的动作指令时,如需经过奇异点,机器人会出现MOTN-063报警。
针对奇异点的处理方法
情况一:在机器人示教时遇到奇异点
处理步骤:
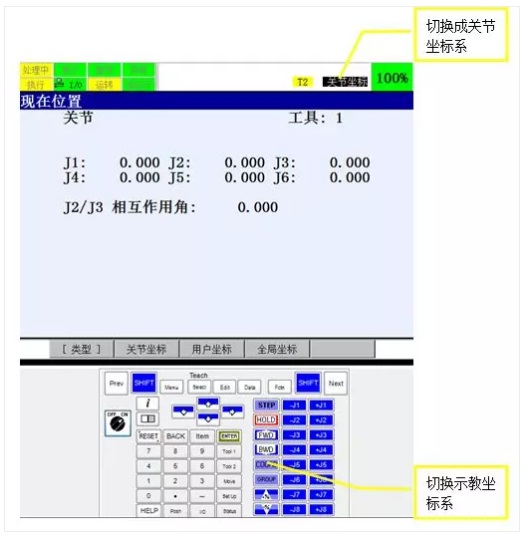
a) 将发那科机器人的示教坐标系切换到关节
b) 点动机器人,让J5轴调离0°的位置,建议小于-3°或者大于3°
c) 按RESET键复位报警
情况二:在程序运行时遇到奇异点
方法一:适合在无精细点位要求使用。
当运行程序时遇到奇异点,可以将该行动作指令的动作类型改为J,或者修改机器人的位置姿态,以避开路径当中存在的奇异点。
方法二:适合在有精细点位要求使用。
在动作指令后添加附加动作指令:手腕关节动作指令WJNT(全名Wrist Joint)。
手腕关节动作指令(Wrist Joint),不在轨迹控制中对手腕的姿势进行控制(标准设定下,程序运行时,手腕的姿势始终被控制)。在直线动作、C圆弧动作、A圆弧动作时能够使用该指令。
当遇到奇异点时,程序中使用该指令,手腕的姿势在动作中发生变化,避开奇异点造成的手腕轴反转动作,使得工具中心点继续沿着轨迹动作。
处理步骤:
a) 将光标移至出现奇异点程序行行末,点击F4选择
b) 选择Wrist Joint
c) 按RESET键复位报警
d) 运行程序,观察运行轨迹
更多关于上下料机器人相关技术知识,可点击导航栏,或与睿易智能联系交流。