在工业机器人应用领域,经常可以听到一个词:运动控制。运动控制泛指众多具有运动性质的自动化控制。今天睿易智能就用专业的视角分析一下工业机器人与运动控制。
一个运动控制系统是一个简单的概念:启动并控制负载的移动来执行工作。它们具有精确的速度、位置和扭矩控制能力。使用运动控制的例子有:应用程序需要的产品定位,独立元素的同步,或者运动的快速启动和停止。
 (网图,侵删)
(网图,侵删)
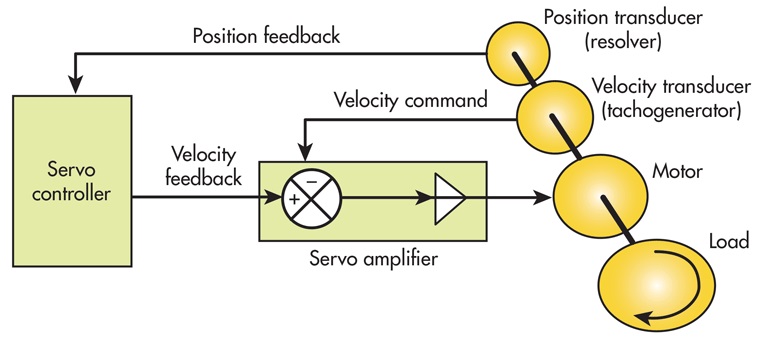
这些系统通常由三个基本组成部分组成:控制器、驱动器(或放大器)和电机。放到工业机器人中,就是工业机器人控制器、工业机器人伺服驱动器、工业机器人伺服电机。控制器规划路径或轨迹计算,向驱动发送低电压的指令信号,并向电机施加必要的电压和电流,从而产生所需的运动。
在一个传统的基于PLC的运动控制系统中,高速脉冲输出卡被应用于PLCs中,用于为每个伺服器或步进驱动生成脉冲序列。驱动器接收脉冲,并且每一个脉冲都有一个预先设定的量。一个单独的信号用来确定传输的方向。这种方法被称为"步骤和方向"。
根据美国工业机器人研究的说法,"工业机器人是一种可重新编程的、多功能的机械手,它可以通过各种各样的动作来移动物体、部件、工具或特殊设备。"
"虽然在动作控制系统中发现的一些部件是在工业机器人内部发现的,但它们是固定在工业机器人内部的。马达的速度、执行力和机械连接都是工业机器人的组成部分。组成一个工业机器人系统的组成部分与运动控制系统相似。这是一个控制器,它允许工业机器人的部分协同工作,并将其与其他系统相连。程序代码被安装到控制器中。此外,许多现代工业机器人使用的是基于电脑操作系统(如Windows PC)的HMIs。
工业机器人本身可以是一个铰接的机器人手臂,笛卡尔,圆柱,球形,斯卡拉,或者一个平行的选择机器人。这些被认为是****典型的工业机器人。工业机器人系统也有驱动器(即:发动机或马达)将连杆移动到指定位置。连接是关节之间的部分。工业机器人使用液压、电动或气动驱动来实现运动。传感器被用于工业机器人环境的反馈,为操作控制和安全提供视觉和声音。他们收集信息并将其发送给机器人控制器。

(网图,侵删)
传感器可以使机器人协同工作——电阻或触摸反馈允许工业机器人在人类工作人员周围进行操作。末端效应器连接到工业机器人的手臂和功能;他们与被操控的产品直接接触。末端效应器的例子包括:夹钳、吸盘、磁铁和焊炬。运动系统和工业机器人之间的区别,这两个系统之间的一个主要区别是时间和金钱。现代工业机器人是现成的交钥匙解决方案。
例如,一个机械手臂已经构造好了,安装起来也很简单。通用工业机器人提供了常见的"装置"和"工业机器人"的例子。它们可以通过HMI控制面板进行编程,也可以通过记录位置运动来记录移动动作。末端效应器可以被替换为你的需要,工程师不必担心工业机器人运动部件的个别编程。
可以说,工业机器人是运动控制升级后的标准产品,结合众多运动控制的成果,****后形成了工业机器人今天的应用。