接上文,为大家介绍第四种上下料机器人的夹具。
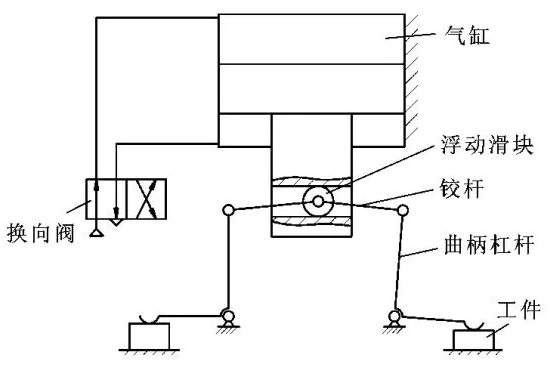
浮动式滚轮的双工位气动夹具
在上下料机器人里,为改善摩擦采用高副滚轮代替低副滑块。其工作原理为: 在滑槽内放置一滚子,两边的铰杆铰接于滚子中心。如图所示,换向阀处于左位时,压缩空气进入无杆气缸腔推动活塞向下运动,当左边工件被夹紧后,浮动滚轮向右移动,通过铰杆-杠杆的复合运动实现右边工件的夹紧。工件加工完毕,换向阀切换至右位工作,压缩空气进入气缸有杆腔,活塞向上运动,夹紧元件松开工件。
单气缸双工位的气动夹具****大的利用了机床的运动能力,工件的切削以及装夹时间重合,节能同时效率提高。针对不能夹紧非等高工件的特点也可以使用上述四种方案来解决,4种解决方法均是解决自由度不足的问题,通过增加一个自由度,从而实现双点浮动夹紧工件。