接上文,上下料机器人的夹具还有铰接式活塞杆的双工位气动夹具和浮动式滑块的双工位气动夹具。
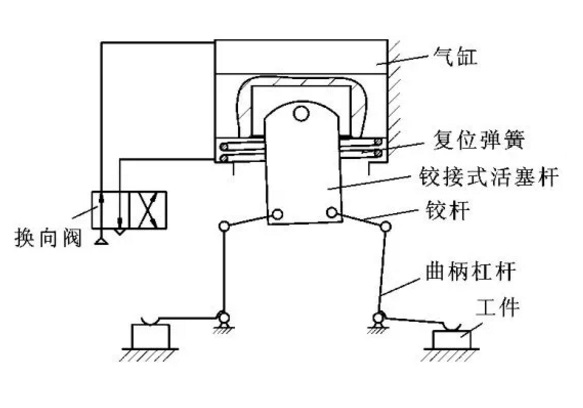
铰接式活塞杆的双工位气动夹具
上下料机器人利用铰接式活塞杆的方法实现双点浮动夹紧工件。活塞杆的质量小于气缸的质量,活塞杆摆动时的惯性低于气缸,噪声有所降低,但惯性冲击和噪声依然存在。图中的工作原理与图2相似,不同之处在于: 当左边工件被夹紧后,活塞杆发生摆动,利用铰杆-杠杆的复合运动实现右边工件的夹紧。活塞杆为单作用运动,一般采用外力松开工件,在图4中弹簧的弹性能恢复推动活塞向上运动,使夹紧元件松开工件。
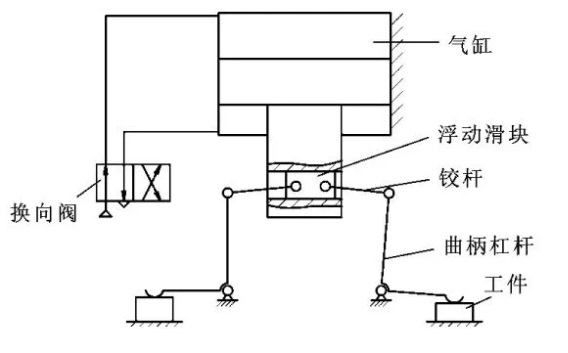
浮动式滑块的双工位气动夹具
上下料机器人上,在活塞杆中放置浮动滑块构成双点浮动夹紧气动夹具。如图5所示,压缩空气进入无杆气缸腔,推动活塞向下运动,当左边工件被夹紧后浮动滑块向右移动,通过铰杆-杠杆之间的复合运动实现右边工件的夹紧。与图3和4相比: 系统的结构刚性有所提高,惯性冲击和噪声较少;同时浮动滑块与滑槽之间的摩擦较大,浮动滑块对制造和安装的要求较高。