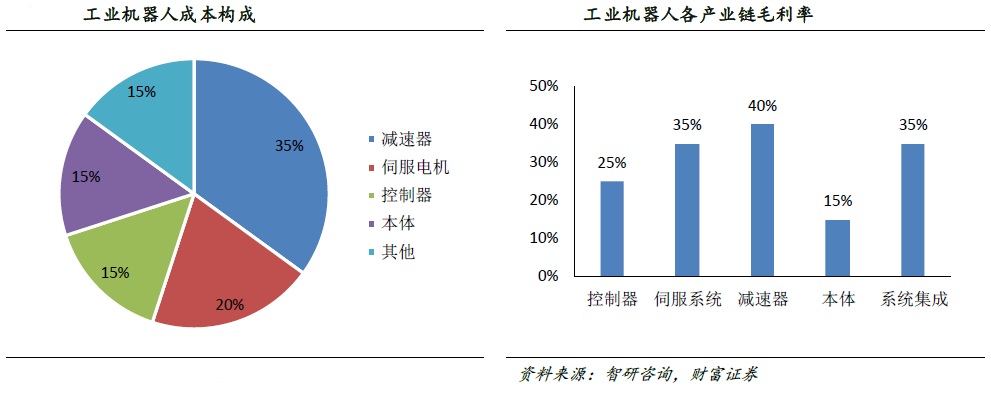
工业机器人的上游核心部件包括减速器、伺服和控制器。这三种零部件基本涵盖了工业机器人70%的成本,之前睿易智能曾发布了有关工业机器人伺服和减速器的相关行业分析,对工业机器人产业链进行了总结和梳理,但是由于技术上的困难,目前工业机器人伺服和减速器的市场依然被国外企业垄断,工业机器人控制器的国内市场也面临同样困局,需要技术的提升和市场的认可。下面介绍一下工业机器人控制器。
 (网图,侵删)
(网图,侵删)
一、工业机器人控制器的功能
控制器是工业机器人的小脑,主要负责控制和协调工业机器人运动控制系统,是工业机器人的主要组成部分,其机能类似于人脑控制系统,支配着工业机器人按规定的程序运动,并记忆人们给予工业机器人的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对工业机器人的动作进行监视,当动作有错误或发生故障时发出报警信号。工业机器人控制系统分为处理器和控制器两部分,处理器用来计算工业机器人关节的运动、监督控制器与传感器协调动作,其功能相当于人类大脑。控制器从处理器中获取数据,控制驱动器的动作,并与传感器反馈信息一起协调工业机器人的运动,其功能相当于人类小脑。
 (网图,侵删)
(网图,侵删)
二、工业机器人控制器组成
控制器由硬件及软件两部分组成。控制器硬件核心在于芯片,为了保证控制系统具有足够的计算与存储能力,目前工业机器人控制器多采用计算能力较强的ARM 系列、DSP 系列、Intel 等系列芯片。软件包括操作系统和算法库两部分,工业机器人专用操作系统包括VxWorks(嵌入式实时操作系统)、Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台等,其中Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台为使用较多的开源操作系统。算法库包括底层算法库以及应用工艺算法,底层算法库的运动学控制算法即规划运动点位,负责控制工业机器人末端执行器按照规定的轨迹达到指定地点。动力学算法负责识别每一个姿态下机身负载物的转动惯量,使其保持****优化输出的状态。应用工艺算法即二次开发,针对不同行业的应用工艺算法,只有在掌握底层算法的基础上才能较好地实现应用工艺算法。
三、工业机器人控制器技术趋势
驱控一体化成为轻载型工业机器人的主要方向。总线型控制系统越来越普遍。以太网和现场总线技术的发展为工业机器人提供了更快捷、稳定、有效的通信服务,基于现场总线的控制系统由控制模块、驱动模块和示教模块三部分组成,三者间的信号传输由电缆或网线完成。总线型控制系统三大模块功率不受限制,具有实时性好,易于实现高速、高精度控制,易于扩散等优点,但缺点在于传输速度慢、硬件体积大、成本较高,因此适用于控制多个大型工业机器人的工业场景。发达国家总线控制方式已经发展多年,具备比较成熟的总线产品和方案。国内控制器公司处于追赶阶段,成效显著。例如2015 年卡洛普推出基于实时以太网的总线型工业机器人控制器;2018年,雷赛智能推出EtherCAT & RTEX 总线方案,未来总线方案的控制器使用将越来越多。
 (网图,侵删)
(网图,侵删)
目前我国部分企业承接了国家863 计划,推出的各种工业机器人控制系统平台,具有体积小、功率密度高、集成度高等特点,提高了设备性能和可靠性。
睿易智能——工业机器人集成应用方案提供者