案例 产品 自动化


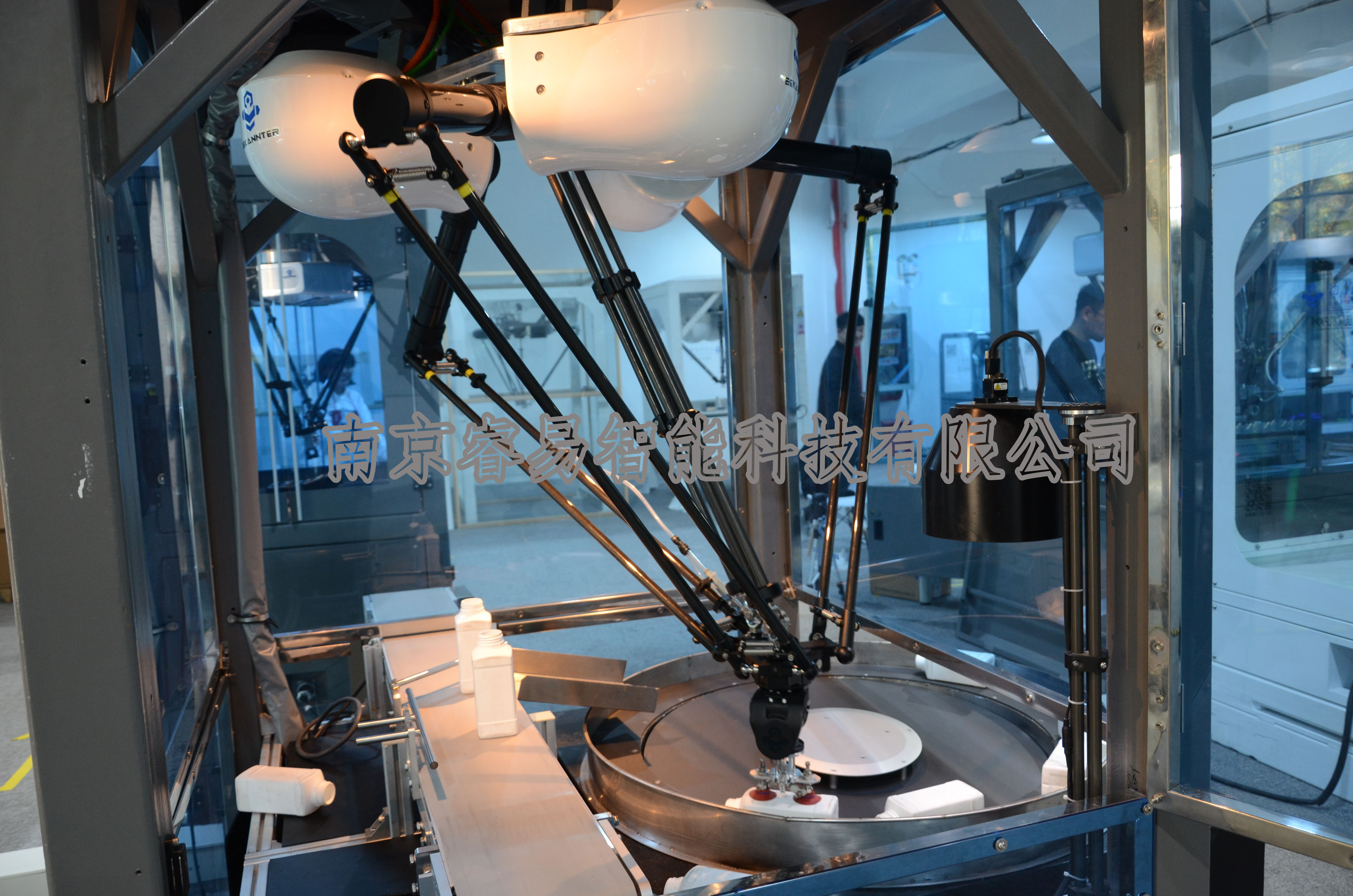


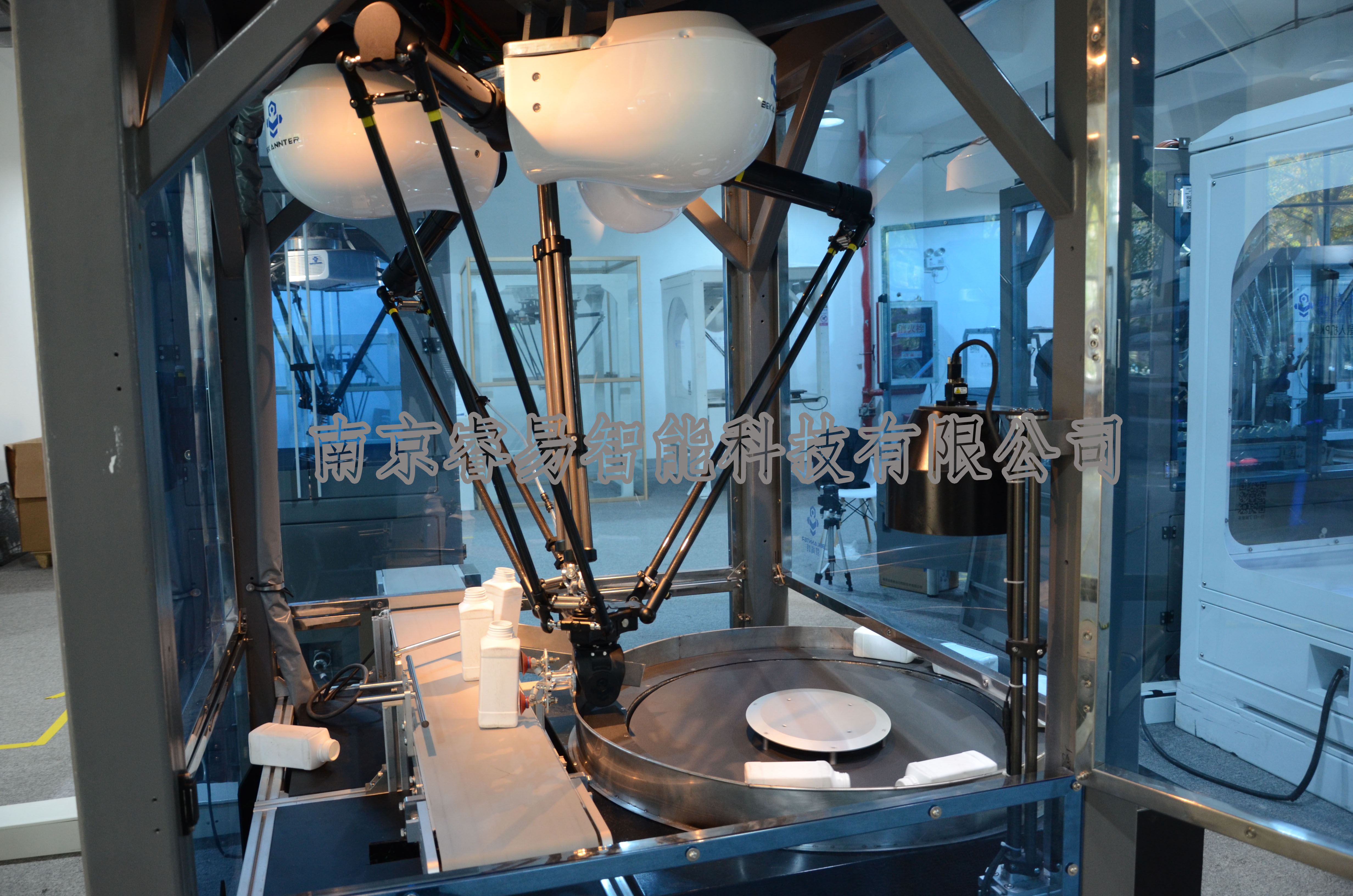
本案例使用了勃肯特3+1轴并联机器人为核心,配套定制的振动盘(图中为模型大小)。
客户将待摆放的空瓶倒入振动盘中,在振动盘传动空瓶至末端时,采用2D视觉相机拍照识别空瓶的姿态和瓶口方向,之后通讯传输数据到并联机器人处。若瓶口方向为正,并联机器人用吸盘将空瓶抓取后,旋转摆放于目标位置;若瓶口方向为反,则并联机器人抓取空瓶后,先翻转第四轴,将瓶口方向调整向上,再旋转摆放至目标位置。
本方案可配合多种多规格输送链、传送带等设备配套使用,效果极好。

| 实施后成果 | 数据 |
| 减少人力 | \ |
| 效率增长 | \ |
| 生产节拍 | 60次/分钟 |
| 不合格率 | 0% |
| 占地面积 | 2㎡ |
| 投资回收期 | 2年 |


| 南京睿易智能科技有限公司 |
| 地址:南京市江宁东山工业集中区丰收路28号 |
| 电话:025-52751992 |
| 传真:025-52757135 |
| 商务合作请联系 | |||
|

扫一扫 加微信
|
||
| 手机:173-0254-6802 | |||
| 微信:173-0254-6802 | |||
| QQ:297866738 | |||
| 邮箱: rayee@rayeeintel.com | |||

